
Chat Face

Chat Zalo

Phone

Thiết bị phục vụ phát triển công nghệ
Thiết bị tự động hoá công nghiệp
Linh-phụ kiện cho xe điện
Thiết bị đo lường
Thiết bị văn phòng, IT, Viễn Thông
Thiết bị gia đình
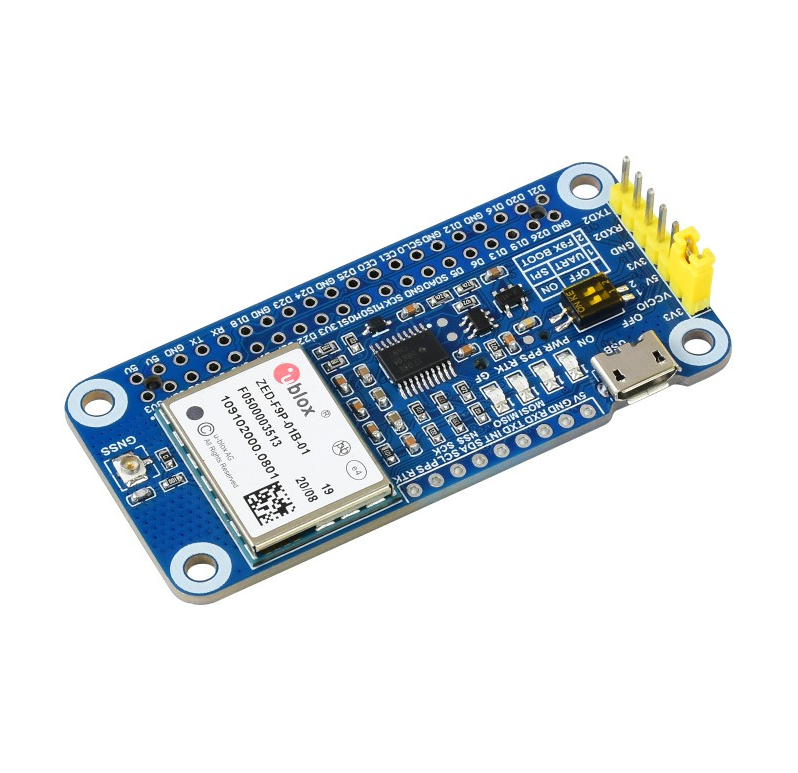
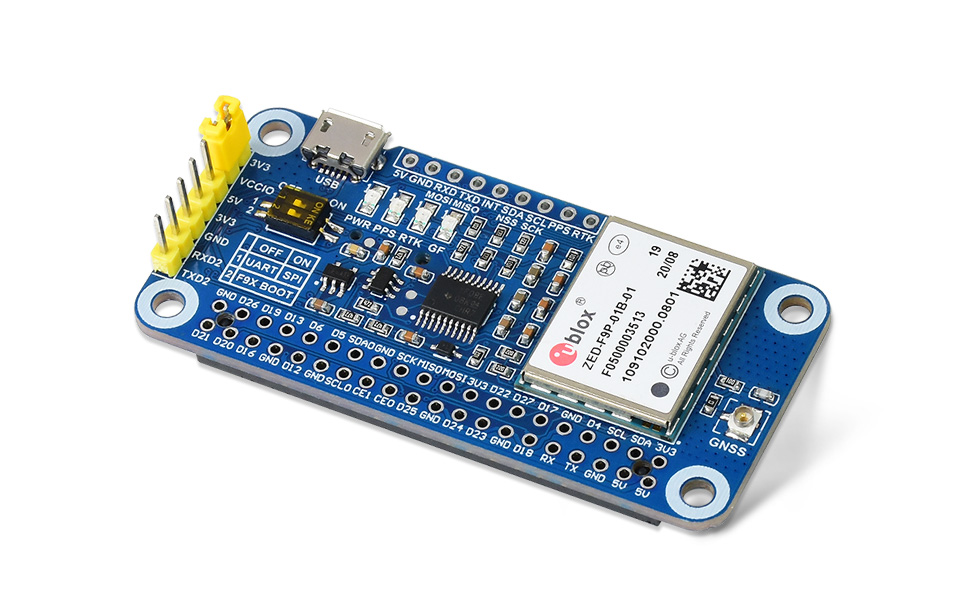
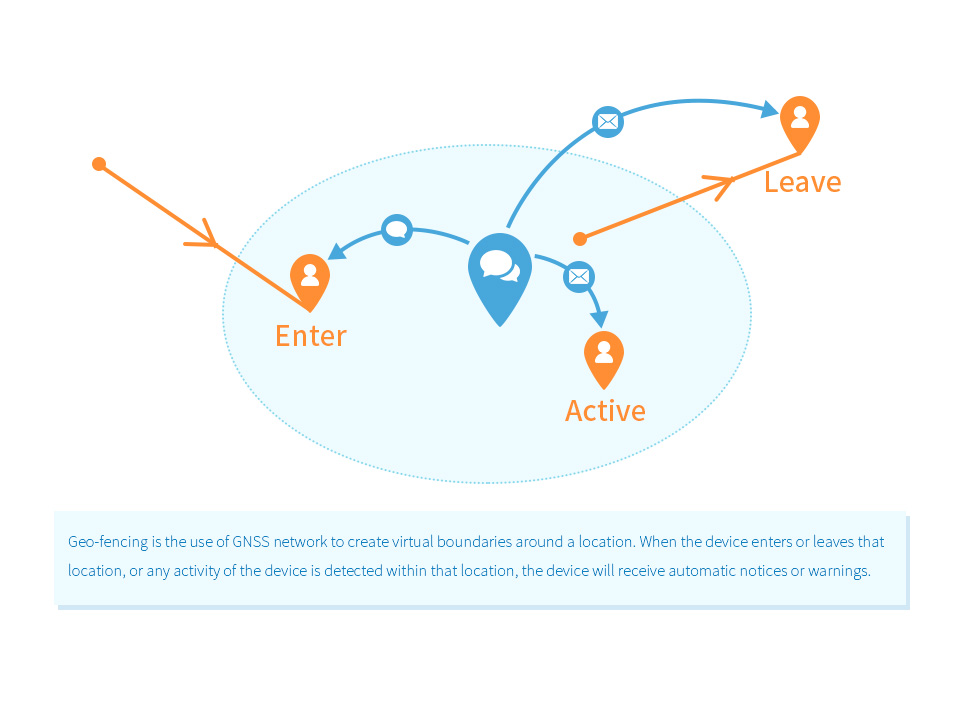
HAT GNSS tích hợp module ZED-F9P của u-blox, hỗ trợ định vị chính xác cấp centimet (RTK).
Hoạt động với các hệ thống vệ tinh GPS, GLONASS, Galileo, BeiDou – hỗ trợ đa tần số (L1/L2).
Cung cấp vị trí thời gian thực có độ chính xác cao với RTCM3 / NTRIP, dùng trong bản đồ hóa, nông nghiệp chính xác, robot định vị.
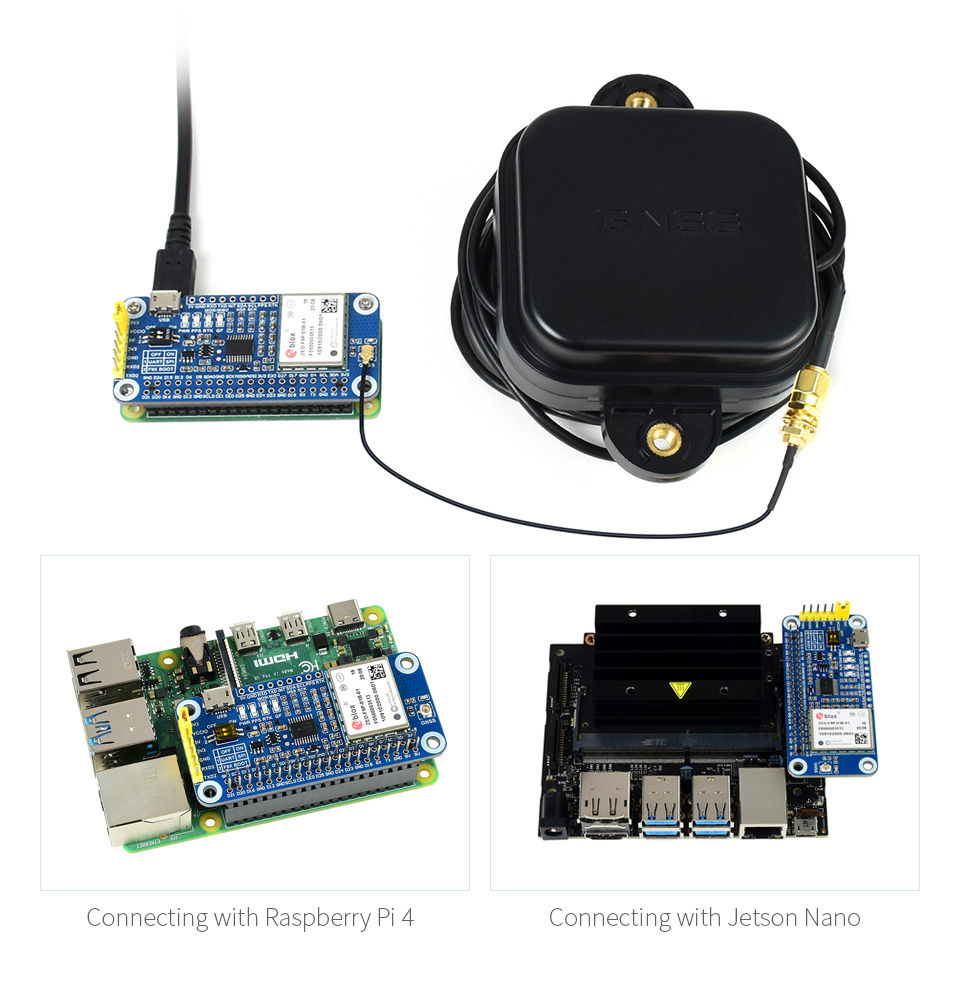
Tương thích Raspberry Pi / Jetson / PC, giao tiếp qua UART hoặc USB.
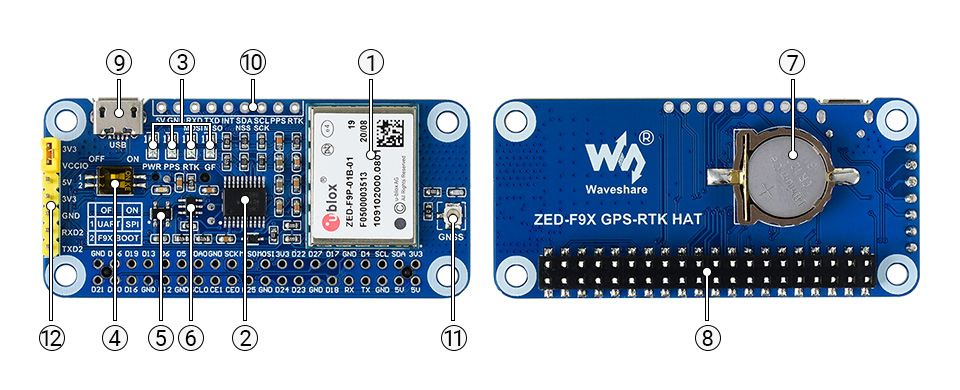
Tích hợp sẵn LED trạng thái, mạch chuyển mức logic cho UART (3.3V/5V), dễ dàng kết nối.
Cổng u.FL cho kết nối ăng-ten GNSS ngoài (hỗ trợ cả ăng-ten chủ động và bị động).
Hỗ trợ đầu vào RTCM cho chế độ RTK Rover, truyền dữ liệu qua NTRIP hoặc sóng radio.
Có thể sử dụng trong nhà kính, khảo sát công trình, dẫn đường robot, UAV, xe tự hành...
 Freeship bán kính TOÀN QUỐC
Freeship bán kính TOÀN QUỐC
Liên hệ hỗ trợ báo giá chi tiết: Hotline: 0378.524.999
Mua hàng tại Showroom Vina Connect Xem đường đi
Mô-đun GNSS cấp centimet dựa trên ZED-F9P cho Raspberry Pi
Công nghệ RTK đa băng tần, định vị chính xác đến từng centimet tính bằng giây, thu đồng thời 4 hệ thống GNSS,
tốc độ cập nhật cao với độ trôi nhỏ, tiêu thụ điện năng thấp, khả năng chống giả mạo và chống nhiễu vượt trội
Đây là hệ thống định vị toàn cầu GNSS HAT Raspberry Pi chính xác đến từng centimet dựa trên ZED-F9P . Thiết bị này cung cấp các tính năng như RTK đa băng tần với thời gian hội tụ nhanh, tốc độ cập nhật cao, hỗ trợ chế độ RTK cơ sở di động, thu đồng thời 4 hệ thống GNSS, hỗ trợ hệ thống định vị mở rộng, định vị chính xác và nhanh chóng với độ lệch nhỏ, và khả năng chống giả mạo và chống nhiễu vượt trội.
Chỉ cần gắn nó vào Pi, bạn có thể dễ dàng kích hoạt chức năng GNSS cho Raspberry Pi.
Tương thích với bo mạch Raspberry Pi, Jetson Nano
được sử dụng làm trạm tham chiếu hoặc thiết bị đầu cuối định vị
Bằng cách thiết lập các trạm tham chiếu chạy liên tục trên mặt đất với tọa độ cố định đã biết bằng mô-đun ZED-F9P hoặc bằng các dịch vụ nâng cao của trạm gốc RTK trả phí, truyền giá trị quan sát được từ GNSS đến các thiết bị đầu cuối ZED-F9P để tải dữ liệu định vị sơ bộ, các thiết bị đầu cuối này, với các lỗi như khúc xạ đa đường, có thể tính toán giá trị quan sát được theo thời gian thực, để định vị ở cấp độ centimet trong vài giây.

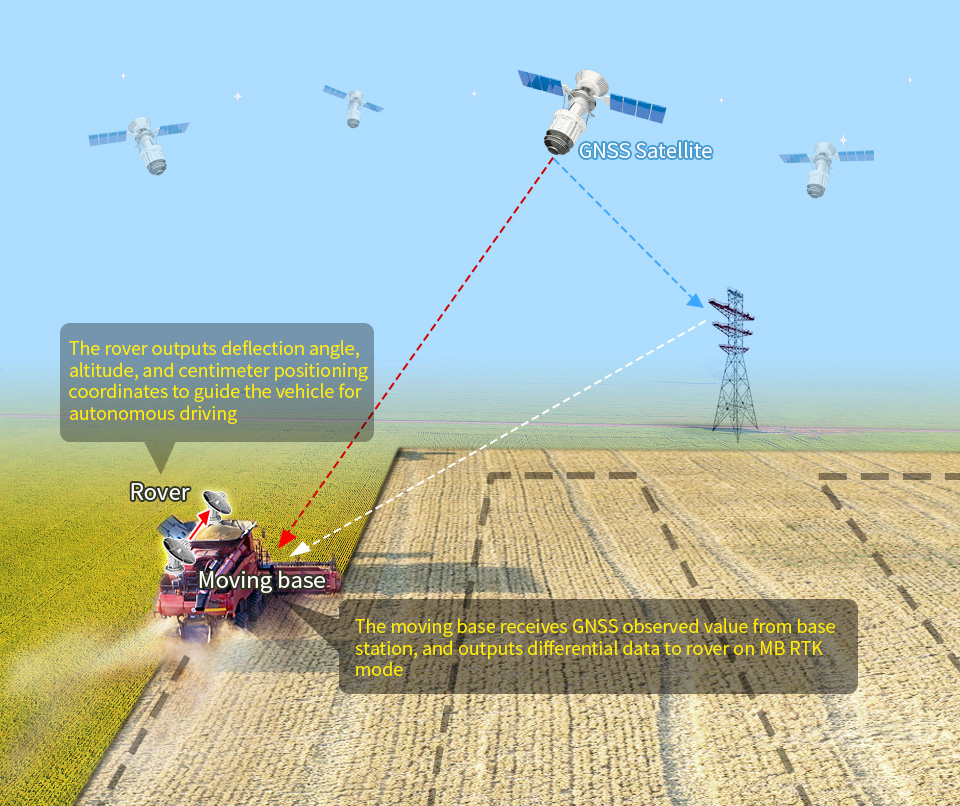
RTK cơ sở di chuyển (MB RTK) là chức năng sử dụng đồng thời hai hoặc ba mô-đun ZED-F9P để xuất ra góc lệch, độ cao, tọa độ định vị đến từng centimet hoặc góc nghiêng chính xác. Chức năng này phù hợp cho các ứng dụng như xác định hướng tàu, điều khiển chuyển động của máy móc hạng nặng, điều khiển hướng xe nông nghiệp, v.v.
Hỗ trợ GPS, Beidou, Galileo, GLONASS
và vẫn duy trì mức tiêu thụ điện năng thấp

Hệ thống tăng cường nhằm mục đích cải thiện độ chính xác, tính hoàn thiện, độ tin cậy và tính khả dụng của định vị và dẫn đường
Hỗ trợ các hệ thống tăng cường bao gồm SBAS, QZSS, IMES, D-GPS

Tính năng - Độ nhạy dẫn đường 167dBm, khả năng chống giả mạo và chống nhiễu vượt trội
một cách dễ dàng để cấu hình mô-đun

Lý tưởng cho việc lái xe thông minh, nông nghiệp chính xác, quản lý đội xe, theo dõi tài sản, ứng dụng GIS...

| Danh mục | Thông số chi tiết |
|---|---|
| Chip định vị | u-blox ZED-F9P (RTK, GNSS đa tần số) |
| Hệ thống GNSS hỗ trợ | GPS, GLONASS, Galileo, BeiDou |
| Tần số hoạt động | L1, L2 (đa băng) |
| Độ chính xác định vị | RTK Fix: ~1cm, RTK Float: ~10–20cm |
| Tốc độ cập nhật | Lên tới 20Hz |
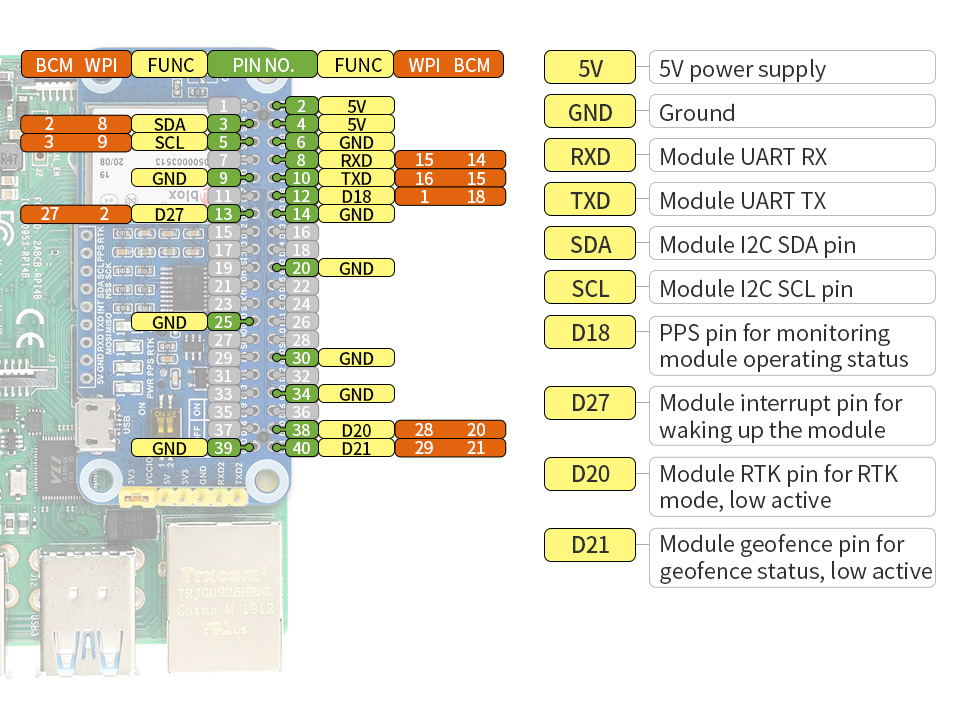
| Giao tiếp | UART (3.3V/5V), USB 2.0 |
| Nguồn cấp | 3.3V / 5V từ Raspberry Pi hoặc USB |
| Giao thức hỗ trợ | NMEA, UBX, RTCM3 |
| Kết nối anten | u.FL (hỗ trợ anten chủ động và bị động) |
| Cổng RTCM đầu vào | UART hoặc USB |
| LED báo hiệu | LED trạng thái (Power, PPS, RTK Fix...) |
| Tương thích phần cứng | Raspberry Pi (Zero/3/4/5/CM4), Jetson, PC |
| Phần mềm hỗ trợ | u-center, RTKLIB, gpsd, NTRIP client |
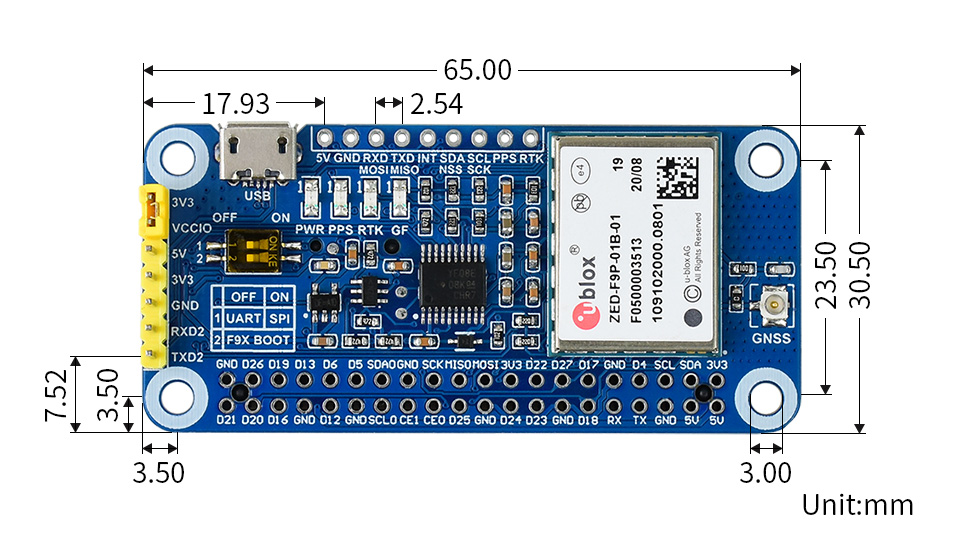
| Kích thước board | ~65 x 56 mm |
| Ứng dụng chính | Robot, UAV, xe tự hành, khảo sát, bản đồ số, học thuật GNSS |
| Bảo hành | 12 tháng (chính hãng Waveshare) |
Raspberry Pi (4B/5/CM4) hoặc Jetson Nano, hoặc PC
ZED-F9P HAT (gắn sẵn module u-blox ZED-F9P)
Ăng-ten GNSS đa băng tần (khuyến nghị dùng có khuếch đại)
Dây micro USB (nếu dùng giao tiếp USB)
Dây UART (nếu dùng qua TX/RX) và nguồn 5V/3.3V
Gắn ZED-F9P HAT lên Raspberry Pi qua GPIO hoặc kết nối qua USB.
Nối anten GNSS vào cổng u.FL – đảm bảo anten được cấp nguồn nếu là loại chủ động.
Cấp nguồn cho Pi, đảm bảo module nhận tín hiệu vệ tinh (đèn LED báo Fix sẽ thay đổi).
Tải và cài phần mềm u-center từ u-blox (nếu dùng với PC).
Trên Pi/Linux, dùng gpsd, gpsmon, minicom, hoặc RTKLIB.
Cấu hình đầu vào RTCM3 từ nguồn hiệu chỉnh (NTRIP caster, Base station...).
Có thể dùng str2str từ RTKLIB để nhận dữ liệu hiệu chỉnh qua internet.
Kiểm tra độ chính xác bằng cách theo dõi fix type:
0: No Fix
1: Standard GPS
2: DGPS
4: RTK Float
5: RTK Fix (cao nhất, sai số ~cm)
Làm trạm Base hoặc Rover trong hệ thống định vị RTK.
Tích hợp vào drone, xe tự hành, robot di động, máy đo diện tích.
Hệ thống dẫn đường nông nghiệp, khảo sát địa hình, đo đạc công trình.
Dự án học tập liên quan đến GNSS, RTK, GIS...
Chúng tôi sẽ liên hệ và gửi báo giá theo thông tin mà bạn cung cấp!




 Top bán chạy
Top bán chạy





